2023全国青少年科技教育成果展示大赛
2023全国青少年科技教育成果展示大赛子赛项——近地轨道卫星回收挑战赛
报名
比赛规则
场地摆放
在志愿者充足的情况下,所有道具统一由志愿者摆放。在志愿者不足的情况下,现场根据实际情况,听从组委会安排。
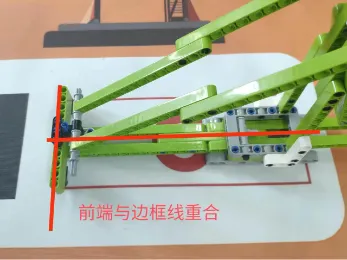
小车起始状态怎么摆放?
小初组轮胎触地点不超过启动区

高中组轮胎触地点不超过启动区
-b1e8b762741be9140dcf4b021bc5c5a8.webp)
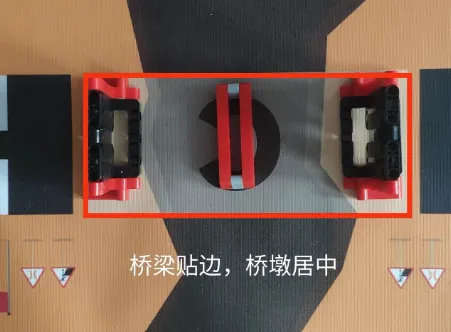
比赛的任务模型怎么摆放?
任务模型放置在任务区的道具红框内,如下图所示。任务模型很轻,现场会通过双面胶贴地。小初任务道具 C/E、高中任务道具 A 存在简单的机械
结构,可现场查看道具便于复原。
小初组
任务道具 A 摆放补充说明:
卫星需放置在卫星回收仓内,不得触地(参考摆放的三视图)
| -2a64db7a5c7600415c20757734e269d7.webp) | |
|---|
任务道具 D 的摆放(参考摆放的俯视图与侧视图)
四个乐高单位高度为:32mm(误差小于 2mm)
台面距离地面高度为:64mm(误差小于 4mm)
 |  |  |
|---|
 |  |  |
|---|
高中组
 |  |
|---|
 |  |
|---|
手动部分资源球按图示交替对称摆放
黄色为水资源仅回收到水资源区得分
灰色为气资源仅回收到气资源区得分
橙色为卫星碎片可被回收至任意回收区

演示视频
赛前准备
调试
1、参赛选手在组委会指定的调试备赛区域进行设备调试;
2、赛前调试时间为 90 分钟(若各省组委会调试时间不为 90 分钟,以当地组委会为准);
3、调试所需设备、地图、电脑、均由参赛选手自行准备;
4、调试时间截止后进行检录;
检录
1、参赛选手由队长带队在检录处排队检录;
2、检录内容为:车体长宽高不得超过 250250250mm,重量不得超过 1.5kg;
3、检录通过后由工作人员对检录队员及机器人贴标,三标数字一致视为检录通过(若组委会不贴标则遵循组委会安排);
4、检录贴标后机器人在自动赛结束前不得进行更改(若组委会不贴标则遵循组委会安排);
5、检录结束后由工作人员,按照检录数字叫号参赛;
裁判工作分配及计分
1、两位裁判工作分配,一位裁判进行计分(得分项与扣分项)、一位裁判进行计时(实际使用时间);
2、每组参赛选手有两次参赛机会;
3、每轮赛事结束后需选手签字确认成绩;
4、参赛选手最终得分为:两次中最高分数;工作人员录入评分汇总表;
5、高中组任务时间为 2 分钟自动+4 分钟手动,小初组任务时间为 4 分钟,选手自动任务完成后立即开始手动任务比赛,计时不停止。
6、机器人自动任务、手动任务均无法完成得分,则视为未完赛。
基本规则
规定时间内未完成所有任务
计分截止、计时截止,以当前分数与时间为本次成绩
规定时间内提前完成所有任务
可向裁判示意完成任务,计分截止、计时截止,当前分数与时间为本次成绩
自动任务与手动切换之间的切换
单场赛事结束
①、每场比赛结束后,所有人员不得触碰赛场上的任何物品,也不得操控机器人
②、裁判会跟选手确认比赛结果,若对结果无异议,则队长代表本方队伍在成绩记录单上签字确认,签字后本场结果不做任何更改。
③、若对结果有异议,则可以在成绩记录单相应位置进行说明并进入仲裁环节处理。
自动阶段
机器人故障
①、选手可举手示意裁判进行设备维修,选手取出机器人维修,每次从场地中拿起机器人都算做一次维修。
③、自动阶段维修后需从头开始,手动维修结束后选手可将机器人放置于取出位置,重新进行比赛。
自动阶段如果有人不循迹,或者通过启动以外命令来控制小车可以吗?
视作违规
小初组自动阶段
卫星回收装置是由裁判随机摆还是参赛队随机摆?
选手
自动阶段的卫星,怎么样算放入 B 区?
卫星任意部分在 B 区的白色的区域内,就算放置成功。
比赛说明
搭建
模型怎么搭建?

注意:
分类过程之中可以熟悉一下各个结构件的样式,方便下面拼装时快速找到对应的套件。
由于批次不同,您收到的【结构件颜色】可能与搭建图纸不一致。
但【销】的颜色 请务必保持与搭建图纸一致【灰色销/米色销】为活动销(连接后较松),【黑色销】为紧销(连接后比较紧)
查看 PDF 格式的平面图,需要较好的空间透视想象力与尺寸观察能力。
小学组:
赛后方案总结
0.66 指的是 Vegeta 软件版本,0.09 指定是蓝牙软件版本
代码上传之后请开关机2次,每次开机后等待小车的舵机与机械臂运动完毕后(约 5 秒)再关机。
观察第 3 次开机之后小车的初始状态,爪子是否正常开合至最紧,机械臂是否正常上升下降至最低。
小初组爪子有 180、60、30、0 度、机械臂有 120、30、0 度
高中组爪子有 180、0 度、机械臂有 120、90、0 度
- 由于各位测试的场地平整度、光照度有所不同,因此对应程序需要自主针对性微调循迹传感器、小车速度、小车结构、程序逻辑等,注意:小车速度过快易导致循迹来不及识别
- 无基础的老师可以学习Arduno-贝吉塔课程后,下载蓝牙传感器配套程序