遥控小车
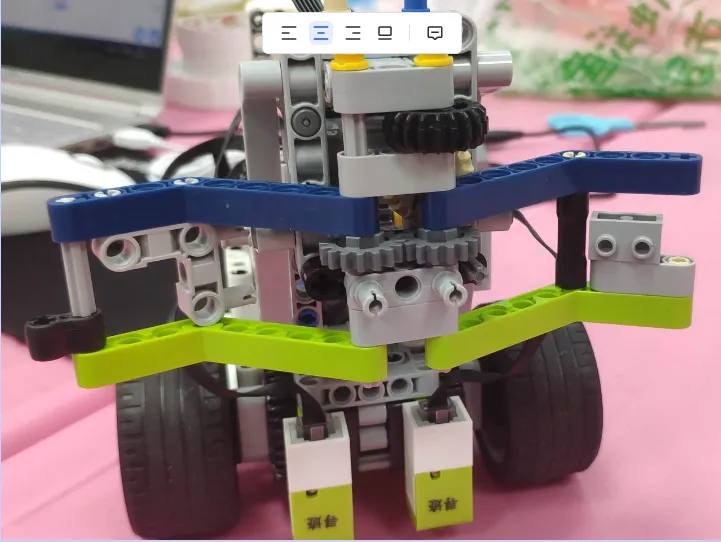
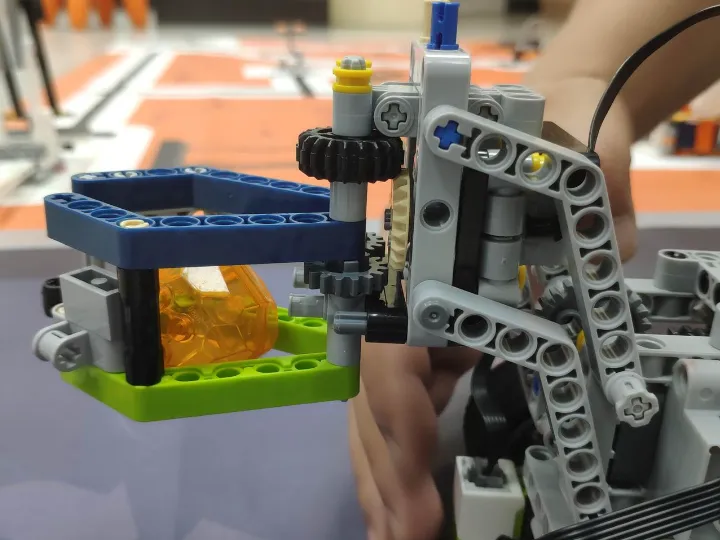
搭建
搭建图纸 爪子车 4.0
调试
各个传感器如何连接?
对于机械车我们默认使用下方的连接方式,主控正常的情况下,不建议更改对应连接位置,连接前请逐一测试传感器。 在 2 个舵机都是 0 度的情况下,形态应当机械臂最高,爪子闭合。

舵机如何调 0
舵机内部是塑料齿��轮,有外力强行转动会脱齿或滑齿,因为装上结构件之后有力矩存在,所以手掰一点对舵机的力都是巨大的,尤其避免在通电的情况下安装。
机械臂调 0 方法
- 舵机上的黑齿轮先不套。把机械臂调到最高

- 舵机先调 0【通过数据线连接编程软件,打开主控电源。选择上传模式,调整舵机角度为 0 度】

- 断开数据线、关闭主控电源。
- 再把舵机上的黑齿套上去。
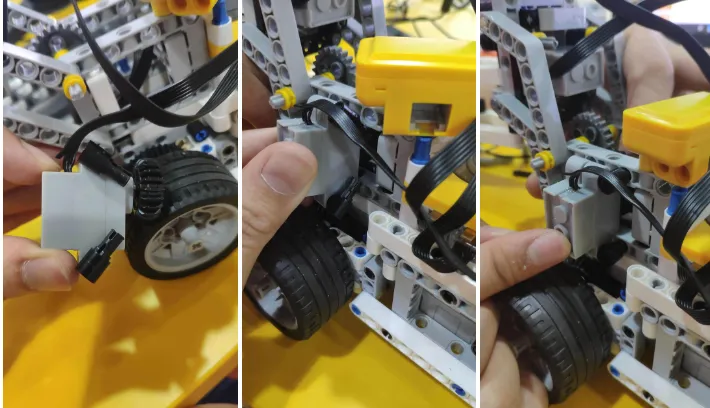
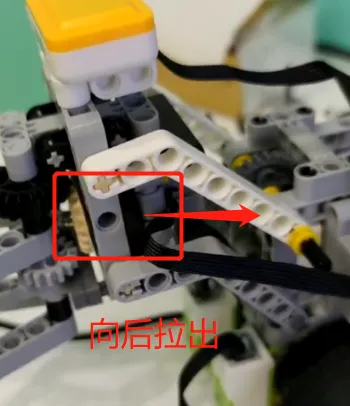
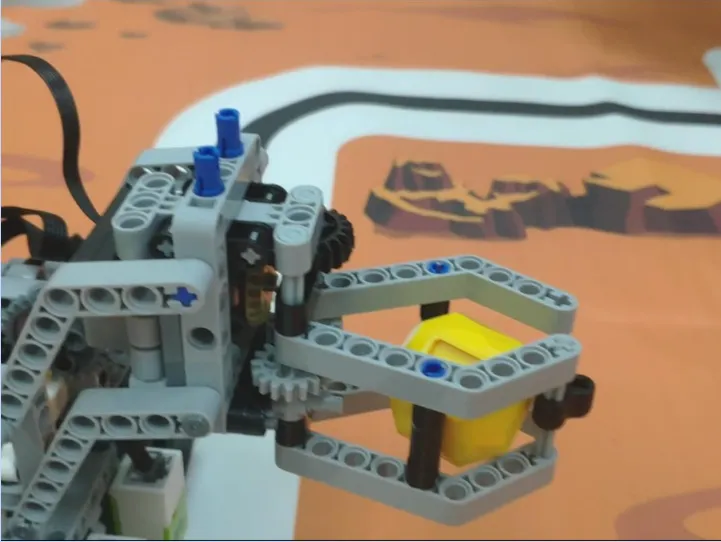
爪子调 0 方法
- 取出爪子上的舵机与米色齿轮(若有对应的固定结构则一并拆除)。把爪子闭合
- 舵机先调 0【通过数据线连接编程软件,打开主控电源。选择上传模式,调整舵机角度为 0 度】

- 断开数据线、关闭主控电源。
- 再把舵机与米色齿轮安装回去(若有对应的固定结构则一并安装)。
遥控程序
遥控软件
根据源代码中的按键进行操作即可以,通常为按 E 启动自动模式。初次使用电脑或手机连接时,可能会出现小车没有任何反应的情况,等待约 20 秒后即可正常控制
常见问题
小车走起来歪扭角度过大/蓝牙控制不了设备如何排查?
1.下载手动控制的代码:上传手动H练习模式.sb3
2.连接好主控至电脑,打开 Vegeta,打开刚才下载的测试代码
3.上传代码,出现 100%为上传成功,拔出数据线,打开电源
4.连接蓝牙,按 H 启动,滑动轮盘向上/下
5.观察小车是否沿直线行驶:0.5 米内直线行驶,偏差角度小于 10°
若小车沿直线行驶,请检查循迹传感器
若小车未沿直线行驶,请检查轴齿是否紧密咬合、轮胎是否摩擦车体、场地是否平整
结构改进
爪子结构
 |  |
|---|---|
 |  |
 |  |